Design
Introduction and Goals
The goal of the spike-mock library is to provide the spike lego developer with a way to test his/her code on a controlled environment, where the external influences are limited and where the synthetic world can be completely mastered.
The key requirements taken into account during the design are :
Note
The spike-mock library shall offer the same interface as the spike library and be completely interchangeable with it.
Some additional API will be provided to configure and orchestrate the scenario flow.
Note
In read mode, the spike-mock library shall be able to mock the spike software component using measurements read from an external database
In this mode, the user controls exactly the software component inputs, and the robot commands have no impact on the software component output
Note
In computed mode, the spike-mock library shall be able to mock the spike software components using a robot model to derive the impact of the robot commands on the robot sensors outputs
In this mode, the user commands have impact on the robot state. The library model the robot displacement in the synthetic scene to compute the sensors measurements.
Note
The spike-mock library shall be able to function in real time, as close as possible to the real robot behaviour
According to the documentation, lego spike components have a measurement update frequency of 100 Hz, which is the spike-library processing rate target
Note
The spike-mock library shall be able to function on controlled time, providing the user with an interface to decidewhen time change.
This mode is useful when testing a complex tracking algorithm where logging and debugging reduced the update rate and change algorithm performance compared to real time scenario, hence making the debugging challenging.
Solution strategy
Data standards
To model the robot behavior, the library needs a description of both the robot mecanics and the context it evolves into. To make the library more user-friendly, its configuration will be based on as much standard as possible :
The robot mecanics will be gathered from a ldraw model. It’s the most widely used in the lego world and it can be easily exported from a CAD project made with the bricklink Studio2.0 tool. The main drawback is that this standard has not spread in the extended robotics world and will therefore require a complex transformation to use more generic robotics libraries
The ground on which the robot eveolves will be provided as an image. The scale and coordinates system associated to the image will be provided in a configuration file
The robot components data for the read mode will be stored in an excel workbook. Since spike robot scenario are limited in time, this design choice will make the library more user-friendly without limiting its performance.
Third parties
There are no well maintained open source packages for ldraw parsing. To avoid redeveloping a new package, the library uses a fork of python-ldraw package, which will have to be maintained in parallel to the library.
There is a lot of robotics libraries providing amazing functionalities. Libraries such as pybullet offer very advanced functionalities but are complex to handle. Though use of such libraries shall be considered in future releases, for now the library will use the wpimath library through its robotpy python interface. It provides useful 3D geometry tools but does not help with the scene rendering.
Building block view
The following image shows the layered architecture of the library
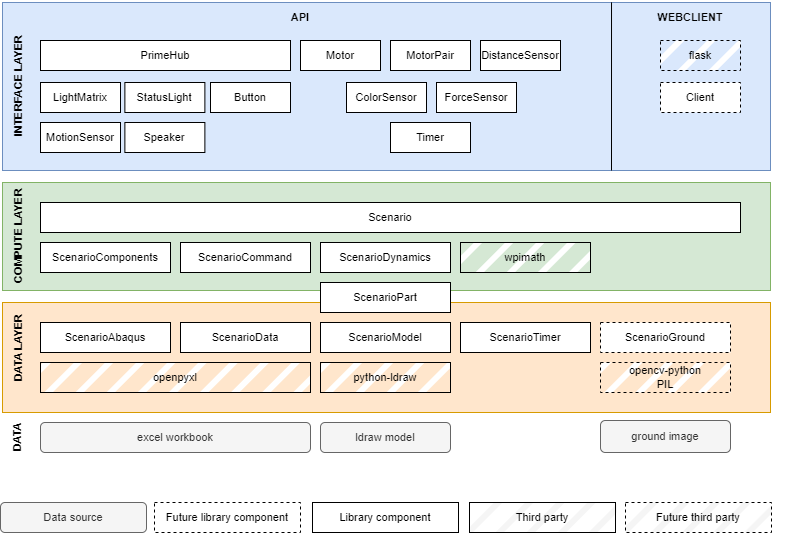
Data layer description
ScenarioAbaqus loads abaqus data from excel workbook and provides interpolation function to extrapolate abaqus outside of its provided data range. This component is typically used to link the motors speed command and its real rotation speed and link wheels ldraw part id to the wheel radius. This component relies on openpyxl to parse excel workbook
ScenarioData loads scenario sensors measurement when in read mode. The link between the data and the component to update are based on the headers : <port>_degrees for motor, <side>_is_pressed for button,… This component relies on openpyxl to parse excel workbook and collect data.
ScenarioModel loads robot parts from an ldraw model file. It then transforms their coordinates and orientation from the ldraw coordinate system where x is right, y is down and z is front to the more standard north, east, down reference. It then computes the position of the wheel centers which will be used as a center point for robot movement. It derives for each part the translation and rotation relative to this center, which will be used when the robot moves to update each part position and orientation from the robot center displacement. This component relies on python-ldraw to parse ldraw file.
ScenarioTimer is responsible for the scenario clock management. Depending on the mode (realtime or controlled), it will update date as scenario flows. It will be used to mock spike timers.
ScenarioGround loads the ground image and its associated scales. It derives the color sensor measure from the sensor position as the robot moves. It is also responsible for providing scenario image by wrapping the robot position on the ground.
Scenario is the single point interface between the spike-like software components and the previous component. It sequences them and manages the update thread updating software components in parallel to the API call from the end-user main thread.
Compute layer description
ScenarioPart and its children contain description of the lego parts involved in the robot movement. They also store dynamics information on the part, and provide functions to model their behavior in a scenario.
ScenarioDynamics is responsible for the management of the robot displacement. It receives the end-user commands, update the robot state, extrapolate the robot position along time and derives software components measurements.
ScenarioCommands is dedicated to the management of the software components commands. It receives command from the end-user through the API software components and either dispatch them to the ScenarioDynamics object, or directly updates the components for simple functions who do not impact other components.
ScenarioComponents register the API software components as they are created and check that there compliance with the robot structure. It updates software components along time from either data or simulated measurements depending on the mode.
Interface layer description
The objects defined in spike libraries (Motor, MotorPair, PrimeHub, ColorSensor, DistanceSensor, ForceSensor, LightMatrix, MotionSensor, Speaker, StatusLight, Timer, Button) are reproduced with the same API. They are nothing but a shell to receive and dispatch data from external sources, either commands from the end-user to the scenario or measurement from the scenario to the end-user
Client component provides a webclient to pilot scenario and display the robot behaviour. It relies on flask to serve this graphical user interface.
Runtime view
The following scenarios show key dynamic behaviour of the library
From interface layer to compute layer
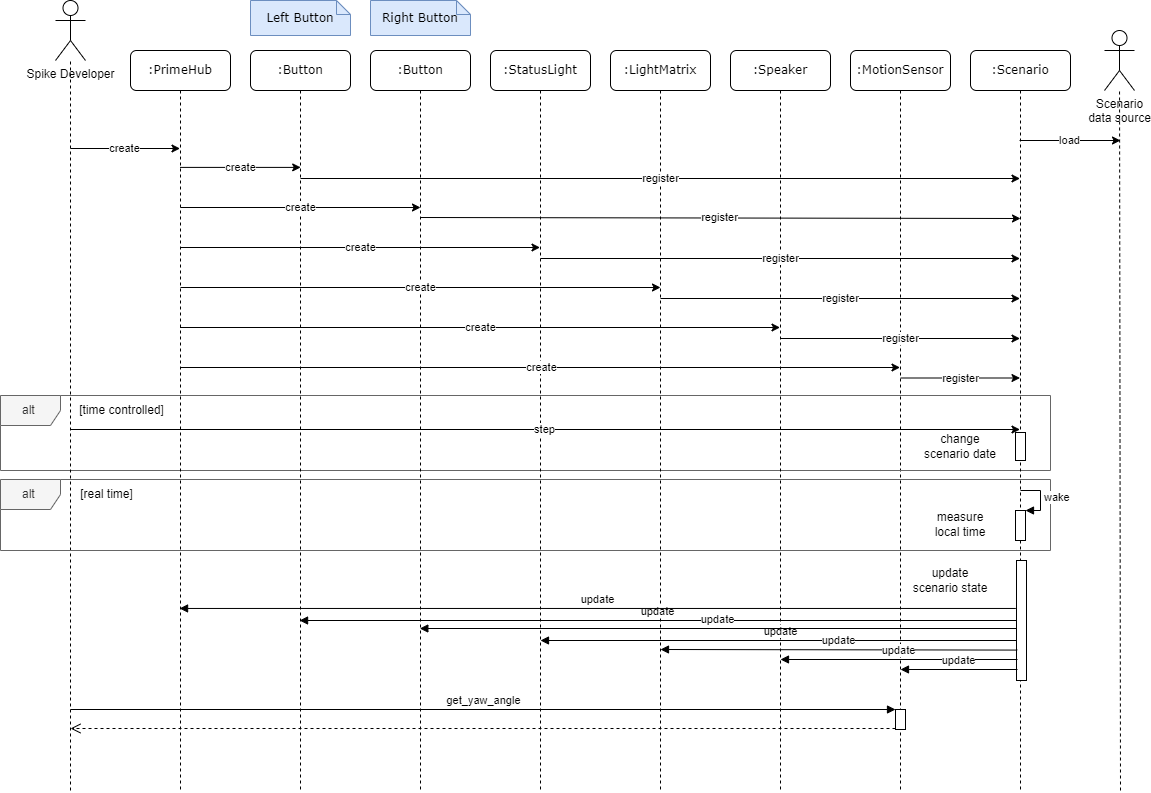
1 - Passive elements update principle
The following sequence diagram details how passive elements of the spike API are updated along time.
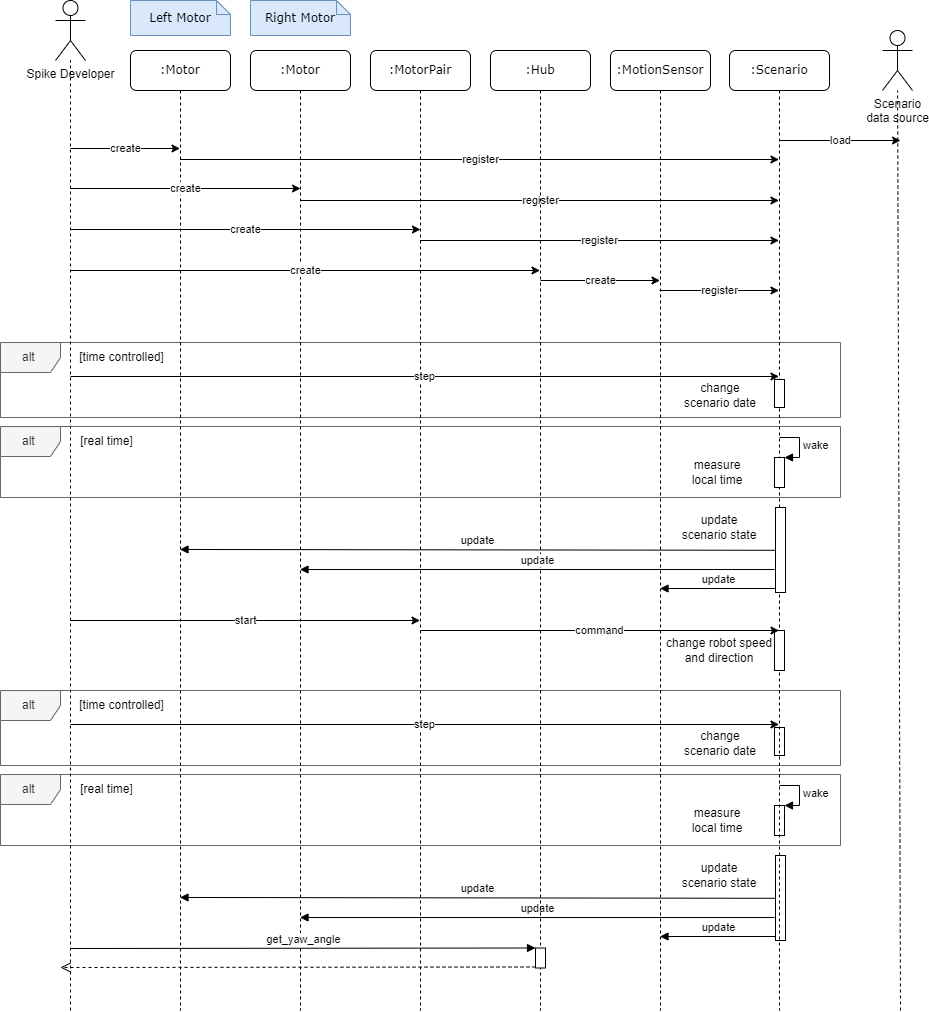
2 - Active elements update principle
A command received by a component can have impact on other components. For example, starting a MotorPair component will change the left and right motor counted degrees and may also change the robot orientation measured by the MotionSensor in the hub component. To handle such a scenario, all the command received by the component that impact the robot behaviour are redirected to the central Scenario component which will update the robot simulated state and redistribute it to all the software components.
The following sequence diagram details how active elements interfere with the scenario to modify the robot state and then the software components state.
Inside compute layer
1 - Scenario parallel processing
The following sequence diagram shows the threading principle of Scenario update and the way it delegates responsibilities to other compute components.
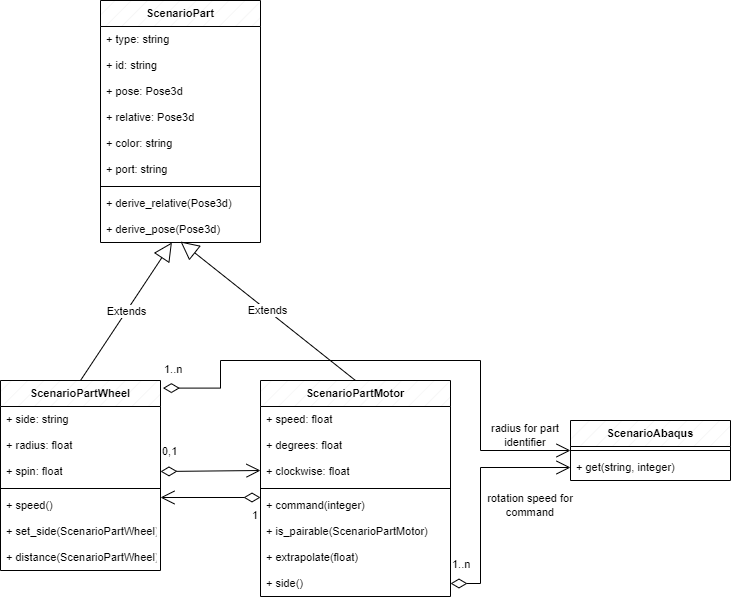
2 - ScenarioDynamics and ScenarioPart interactions
The following sequence diagram shows how ScenarioDynamics leverages ScenarioParts to link the command and the structure response.
Detailed description
Deployment view
The spike-mock is provided under 2 packaging :
A python module which can be directly used through its API in a larger python code
A docker image which can be accessed through a rest API and a web client to manage scenario from a graphical user interface (coming soon)
Concepts
Coordinates systems
Ldraw coordinate system
The ldraw coordinate system for robot structure description is defined as follows :
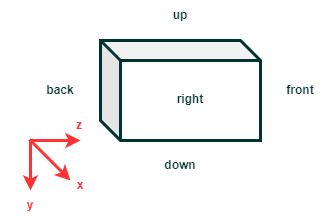
The x axis of the ldraw coordinate system is oriented from left to right of the scene.
The y axis of the ldraw coordinate system is oriented from up to down.
The z axis of the ldraw coordinate system is oriented from back to front.
When modelling a robot under Studio2.0, the position of the center can be anywhere in the scene. Orientation is key, though : the front of the robot shall be the side viewed when selecting the front orientation view to match the library requirements. When exported a robot matching this requirements in ldraw format, the x and z axis are not adequately oriented, which is corrected in the library.
NED coordinate system
The North-East-Down coordinate system is defined as follows :

The x axis ot the NED coordinate system is oriented north on the mat world, which is top
The y axis of the NED coordinate system is oriented east on the mat, which is right
The z axis of the NED coordinate system is oriented down.